Contrôler un mini servo avec Arduino


Fonctionnement d’un servo moteur
Tout d’abord, il faut s’avoir qu’un servo permet d’effecter des déplacements en translation ou en rotation. De nombreux objets du quotidien utilisent des servo moteurs: voitures télécommandées, drône, électroménager, …Les différents types de servos se distingue par 3 caractéristiques:
- leur vitesse de rotation par seconde
- leur course en degré
- leur couple exprimé en kg.cm
Ces impulsion doivent être envoyée de manière périodique, généralement toutes les 50ms.
Il n’y a rien de compliquer pour brancher un servo. Les servos ont généralement 3 fils:
- un rouge: qui doit être branché au 5V (ou 12V suivant votre servo)
- un noir : qui doit être branché à la masse
- un orange (ou autre couleur) : qui est le fil de tension de commande 0-5V
Voyons maintenant comment connecter un mini servo à notre Arduino.
Connecter un servo sur un Arduino
Voici le montage que j’ai réalisé pour tester mon mini servo:
Il suffit ensuite de charger le sketch suivant dans votre Arduino. Ce script utilise la librairie Servo nativement disponible dans l’outil de développement de votre Arduino.



// Sweep
// by BARRAGAN <http://barraganstudio.com>
// This example code is in the public domain.
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
===========================================================================
==========================================================================
Télécommande par infrarouge - Tutoriel Arduino
Matériel utilisé
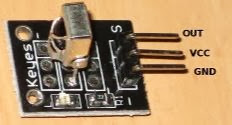
- 1 récepteur infra-rouge 3 broches 38 kHz (portée 18 fts), type WS 1838B seul ou module monté sur PCB avec led témoin (mieux pour vos premiers essais).
- 1 petite télécommande IR standard à 20 boutons avec sa pile bouton (retirer la languette pour activer la pile).
- 1 télécommande de téléviseur
- 1 carte Arduino Uno R3
- 1 breadboard et fils de câblage mâle/mâle à connecteur Dupont
 .
. .
.
Principe de fonctionnement
Une diode émet des pulses en infra-rouge pour transmettre un signal de télécommande codé, vers à un récepteur infra-rouge placé dans un appareil que l'on commande à distance.
C'est le principe de télécommande utilisé sur tous les téléviseurs, magnétoscopes, appareils photos...
On peut l'utiliser pour ses projets personnels de robotique, domotique... à partir d'une petite télécommande standard, ou en décodant sa propre télécommande de téléviseur par exemple.
La portée est de plusieurs mètres, en ligne droite sans obstacles, le signal est invisible à l'œil humain.
Il existe de nombreux protocoles de transmissions (NEC, Sony SIRC, Philips RC5, Philips RC6, données brutes...) et plusieurs manières de coder les informations. Certains protocoles demande de répéter trois fois l'information.
Heureusement une bonne librairie pour Arduino gère tout ça.
Les signaux IR sont modulés à 38 kHz pour éviter les interférences avec la lumière ambiante. Le récepteur 38 kHz gère cette modulation directement.
Ceci permet de ne pas brouiller les appareils IR entre eux et d'avoir plusieurs fonctions par télécommande (on/off, choix de chaîne, réglage du volume...).
Applications
- Télécommande par infrarouge de ses projets (robot, commande de volet roulant, domotique, éclairage...)
- Enregistrer les codes d'une télécommande existante et les ré-émettre à l'identique pour cloner la télécommande
- Regrouper plusieurs télécommandes en une seule (TV + Magnétoscope + DVD + éclairage du salon + chauffage).
- Utilisation d'une télécommande existante pour un autre appareil.
- Remplacement d'une télécommande perdue
Emission infra-rouge
Pour l'émission on peut utiliser
- Une télécommande existante (TV, magnétoscope DVD...) dont on analyse les codes.
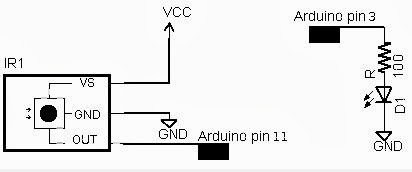
- Une simple diode infra-rouge branchée sur sortie numérique (pin3), avec une résistance R1 100 Ω pour limiter le courant.
- Une petite télécommande standard (21 boutons) à usage assez universel (solution la plus pratique)
Réception du signal
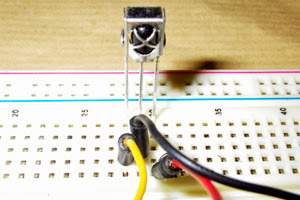
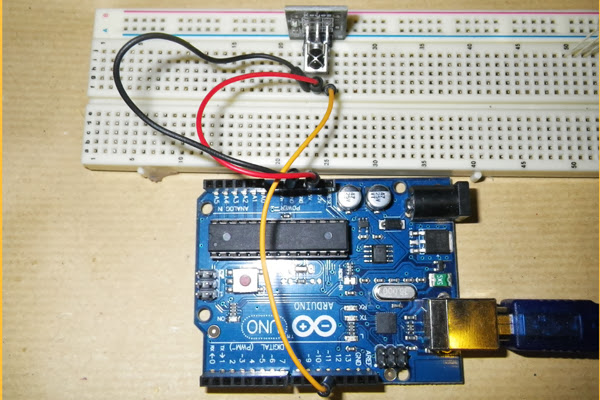
Le détecteur (3 broches) est branché sur une broche digitale pin11.
 .
.
Récepteur -->Arduino
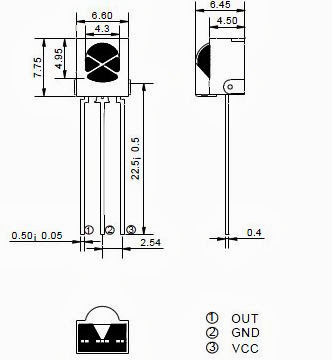
- De gauche à droite, vu de face, broches 1 OUT, 2 GND, 3 VCC sur le composant seul.
- Attention, sur la plaquette PCB le brochage est inversé, de gauche à droite on a
GND (indiqué -), VCC (au centre), OUT (indiqué S)
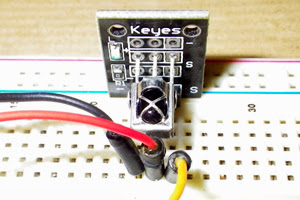
Le bon fonctionnement du récepteur est indiqué par une petite led rouge sur le PCB qui s'allume à chaque réception.
Câblage :
 .
.
Programmation
Télécharger et installer la librairie #include <IRremote.h>
Elle comporte deux fichiers IRremote.cpp et IRremote.h et un sous-répertoire examples
Il faut aussi installer la librairie IRremoteInt.h
Exemple de code de réception
- Code: Tout sélectionner
#include <IRremote.h>
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Initialise le recepteur
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
irrecv.resume(); // Recoit la valeur suivante
}
}
Utilisation
Le serial monitor de l'IDE Arduino va directement afficher les codes reçus par la télécommande.
La petite led témoin sur la plaquette du récepteur s'allume lors d'une réception de signal de télécommande IR.
Décodage des touches de la télécommande standard à 21 boutons
Petit modèle simple, assez universel et bon marché, qui convient à la plupart des projets.

=======================================================================
=======================================================================
Capteur ultra son HC-SR04
Les caractéristiques techniques du module sont les suivantes :
- Alimentation : 5v.
- Consommation en utilisation : 15 mA.
- Gamme de distance : 2 cm à 5 m.
- Résolution : 0.3 cm.
- Angle de mesure : < 15°.
Le brochage du module est le suivant :

Le fonctionnement du module est le suivant :
Il faut envoyer une impulsion niveau haut (à + 5v) pendant au moins 10 µs sur la broche ‘Trig Input’; cela déclenche la mesure. En retour la sortie ‘Output’ ou ‘Echo’, va fournir une impulsion + 5v dont la durée est proportionnelle à la distance si le module détecte un objet. Afin de pouvoir calculer la distance en cm, on utilisera la formule suivante :
distance = (durée de l’impulsion (en µs) / 58
Voici une représentation graphique de la séquence de fonctionnement du module :
Après la théorie passons à la pratique; le câblage du module à l’Arduino sera le suivant :
- broche 12 de l’Arduino vers Trig.
- broche 11 de l’Arduino vers Echo.
Le programme sera le suivant :
| /* Utilisation du capteur Ultrason HC-SR04 */ // définition des broches utilisées int trig = 12; int echo = 11; long lecture_echo; long cm; void setup() { pinMode(trig, OUTPUT); digitalWrite(trig, LOW); pinMode(echo, INPUT); Serial.begin(9600); } void loop() { digitalWrite(trig, HIGH); delayMicroseconds(10); digitalWrite(trig, LOW); lecture_echo = pulseIn(echo, HIGH); cm = lecture_echo / 58; Serial.print("Distance en cm : "); Serial.println(cm); delay(1000); } ---------------------------------------------------------------------------------------------------------------_____________________________________________________________________________________________________________________________ _____________________________________________________________________________ 10 novembre 2012 par Le robot doit être capable de détecter devant lui des obstacles. Pour cela, on placera deux contacteurs à l’avant. Activité 1 :Réaliser l’organigramme de programmation Exemple :  Activité 3 :Programmer le robot avec PhysicalEtoys sans liaison filaire Il faut programmer physical etoys en changeant le mode de connexion. Il faut ensuite charger le programme principal (les sous-programmes seront aussi chargés).   Activité 4 :Programmer avec l’IDE arduino // robot avance, tourne droit ou gauche si capteur droit ou gauche |

Aucun commentaire:
Enregistrer un commentaire